










总部地址
杭州市滨江区西兴街道中国数谷3号楼16楼
别再让机器人困在实验室:关于场景数据采集,算法团队最关心的五个问题 ——景联文真实环境数据采集服务
当算法团队准备推进具身智能的实景部署时,数据采集往往成为最耗时、最不可控的环节。场地准入难、环境一致性差、任务流程不连贯、长尾场景缺失——这些问题反复消耗着团队的精力。
景联文公司基于12大核心场景的系统化采集能力,为上述问题提供工程化的解决方案。以下从五个关键决策点出发,阐述我们的服务如何帮助团队高效获取高质量的真实环境数据。
景联文已建立12大类环境、80余种子场景的采集矩阵,覆盖具身智能典型作业空间。每一类均明确对应的业务类型与典型任务,如下表所示:
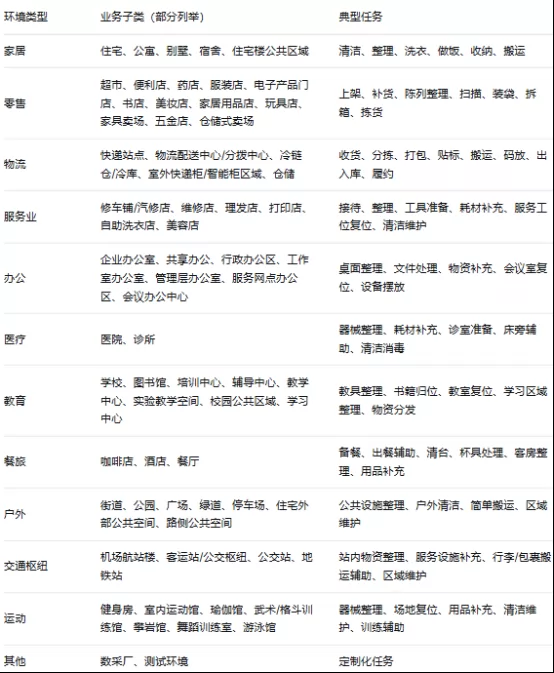
您可直接选择上述已有场景的数据集,或提出新场景需求,我们通过现有资源网络进行扩展采集。
真实场景采集最大的挑战在于——同一个超市、同一组货架,不同时间的光照、陈列、人流都可能变化,导致数据不可比。
景联文的解决方案是 “标准化采集区+场景布局规范图”:
在合作商超、办公室、仓库等实景中,预设固定采集区域,统一货架尺寸、层高、物料摆放标准。
每次采集前,依据场景布局规范图复位环境,确保空间几何关系一致。
同时记录环境元数据(光照、噪音、人员密度),供您在模型训练时按需筛选或分层分析。
这一方法已在三马产业园和白云区职院基地等自建场地中得到验证。
机器人需要学会的是“一系列动作构成的作业”,而非单次抓取。景联文采用任务驱动型采集,为每个场景预定义标准作业流程(SOP),并按流程逐段采集。
以零售场景的“补货”任务为例,完整流程包括:
拆箱 → 取货 → 上架 → 陈列整理 → 扫描条码 → 回收包装。
每一段数据均标注当前任务阶段、起始/结束状态,支持直接用于模仿学习或端到端策略训练。
对于需要自定义任务的客户,我们可依据您的SOP进行定向采集,并联动政府及产业资源快速落地非标准场景。
实验室环境往往过于“干净”,而真实世界中存在大量干扰。景联文的采集原则是不刻意清理环境:
l 家居场景中保留散落的玩具、未叠的衣物
l 零售场景中保留顾客翻乱后的货架状态
l 户外场景中保留落叶、积水、行人穿行
此外,我们还利用贵州旅游旺季的客流高峰,在交通枢纽、广场、商业区等场景中同步采集人机共存、避障、排队等动态交互数据,增加数据的场景复杂度。
真实场景采集最大的门槛在于场地准入。景联文通过三层次资源网络解决这一问题:
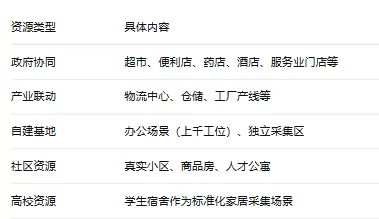
依托上述网络,我们能够快速获取多类型实景的采集授权,并支持全流程定制方案:您指定场景与任务,我们负责场地协调、采集执行、数据交付。
景联文提供两种主要合作方式:
1、标准化数据集:从已有12大类场景中选择,包含多子场景、多任务的完整数据包。
2、定制化采集:针对您的特定场景、任务、传感器配置,完成从方案设计到数据标注的全流程服务。
如需了解更多,欢迎咨询。





总部地址
杭州市滨江区西兴街道中国数谷3号楼16楼
北京分公司
北京市海淀区光耀东方广场1幢9层902室
重庆基地
重庆市两江新区卉竹路2号互联网产业园2期11号楼5楼
贵阳基地
贵州省贵阳市云岩区中建大厦36楼

微信公众号

客户咨询微信
CopyRight ©️ 2026 杭州景联文科技有限公司 All Right Reserved.